Image-guided navigated interventions represent a cutting-edge approach to medical procedures, seamlessly merging advanced imaging technologies with precise navigation systems to enhance the accuracy and efficacy of interventions. This approach allows medical professionals to visualize internal structures in real-time using high-resolution imaging modalities like MRI, CT, or ultrasound. By integrating these images with navigational guidance, clinicians can perform minimally invasive procedures with precision, reducing the risk of damage to surrounding tissues and improving patient outcomes. Our research explores the use of these approaches in various clinical applications including cardiology, breast cancer, radiation therapy, and virtual reality.
NaviKnife
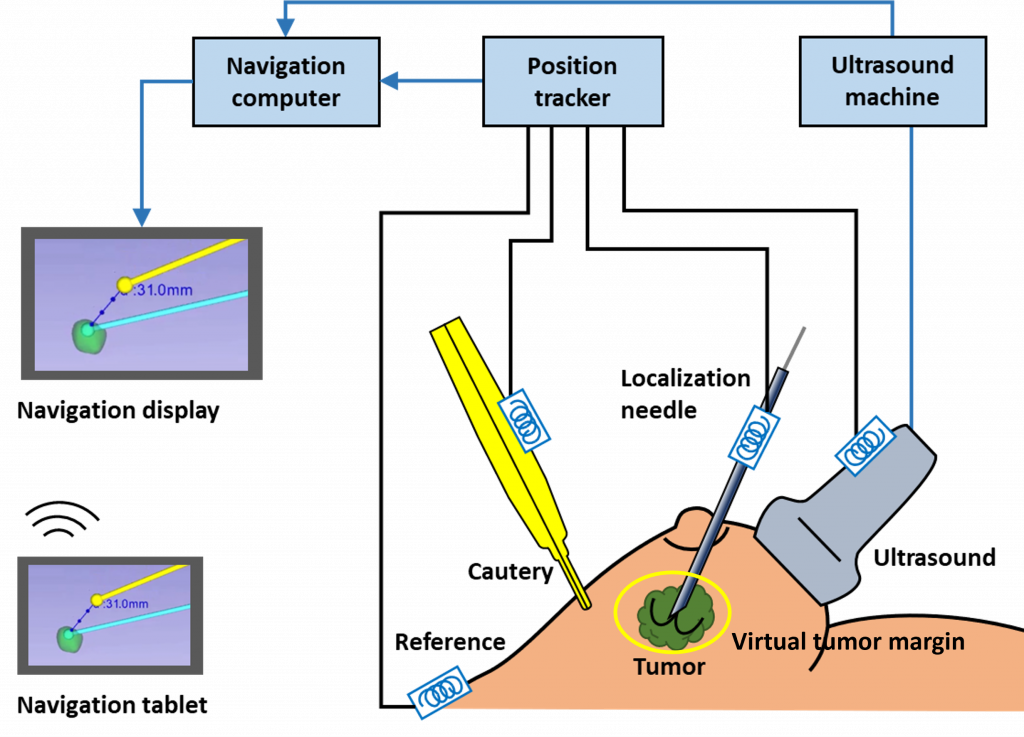
Preserving healthy tissue while ensuring complete tumor removal is a constant challenge in breast cancer surgery. The high deformability of the breast tissue makes it difficult to follow the margin of the tumor. The NaviKnife is an ultrasound-guided surgical navigation system developed by our group that addresses this issue by visualizing the movement of the surgical tools relative to the tumor in real time. Preliminary studies of our system show a decrease in positive margin rates and excised specimen weight size in the study patients, demonstrating its potential in breast cancer treatment.
NousNav
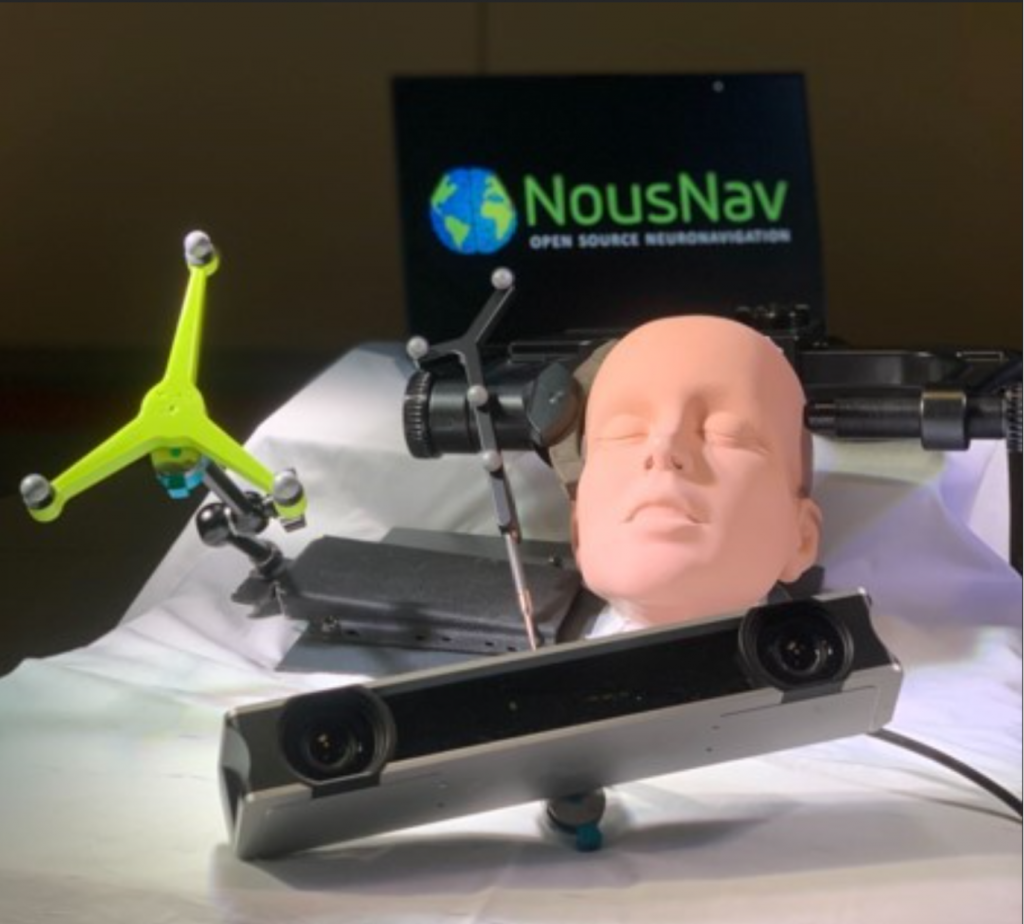
Neurosurgery faces significant challenges globally due to a shortage of surgeons, especially in low and middle-income countries (LMICs), where there may be as few as 1 neurosurgeon per 10 million people. Access to advanced tools like computer-assisted neuronavigation, common in high-resource settings, is limited in LMICs due to high costs and maintenance. The NousNav project, initiated in 2019 by the Golby Lab at Brigham and Women’s Hospital in collaboration with Queen’s University and Kitware, addresses this issue by developing a low-cost, open-source alternative to commercial neuronavigation systems. By combining affordable hardware and free software, NousNav provides essential neurosurgical functionalities at less than $8,000 USD, making it accessible to centers worldwide and contributing to research in the field.
Slicer and ROS2
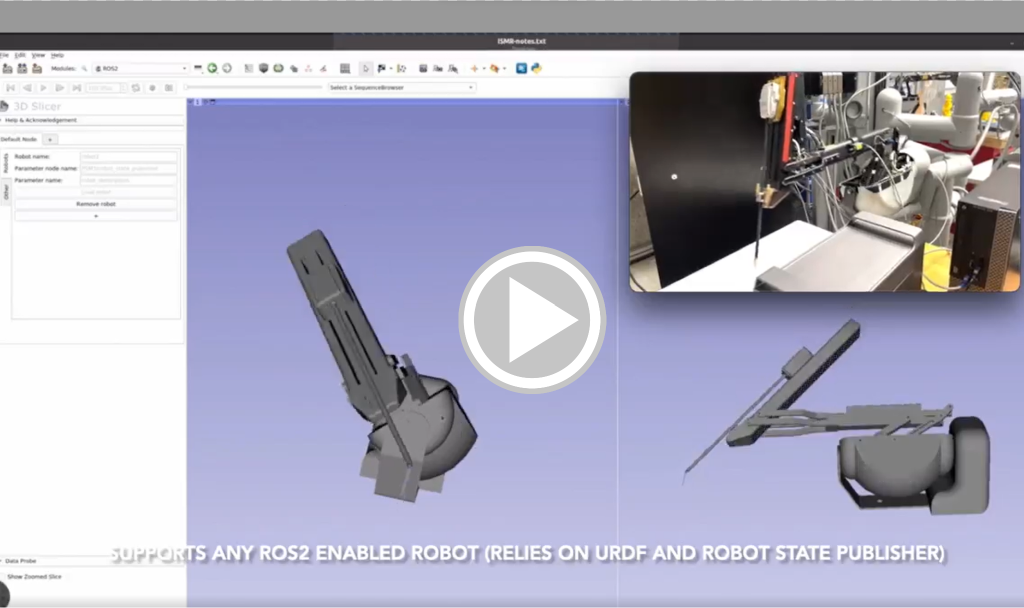
Developing image-guided robotic systems relies on open-source software. 3D Slicer, a widely adopted medical imaging platform, and the robot operating system (ROS) are key tools for research. Past attempts to integrate them lacked full access to the tools and relied on middleware. To address this, the SlicerROS2 module was created, allowing direct use of ROS2 packages in 3D Slicer. Developed with researchers from Johns Hopkins University and Brigham and Women’s Hospital as part of the ROSMED initiative (https://rosmed.github.io/), it facilitates real-time robot visualization, supports diverse configurations, and enables bidirectional data transfer between ROS and Slicer.